Ph.D. Student in Computer Science at George Mason University

RobotiXX Lab
George Mason University
Fairfax, VA 22030
I am a Ph.D. student in Computer Science at George Mason University, working under the supervision of Dr. Xuesu Xiao at the RobotiXX Lab. Our lab pioneers adaptive learning paradigms for autonomous robotics, and my research addresses a fundamental challenge in robotics: how can robots learn complex behaviors as efficiently as humans do, adapting from simple to complex tasks while maintaining robustness in real-world deployments?
My work centers on Curriculum Learning for Robotics - developing intelligent systems that learn progressively, much like how humans master skills through structured practice. I believe the future of robotics lies not in hand-crafted solutions, but in self-improving systems that can adapt their learning strategies based on performance feedback. This vision has led me to develop two complementary frameworks:
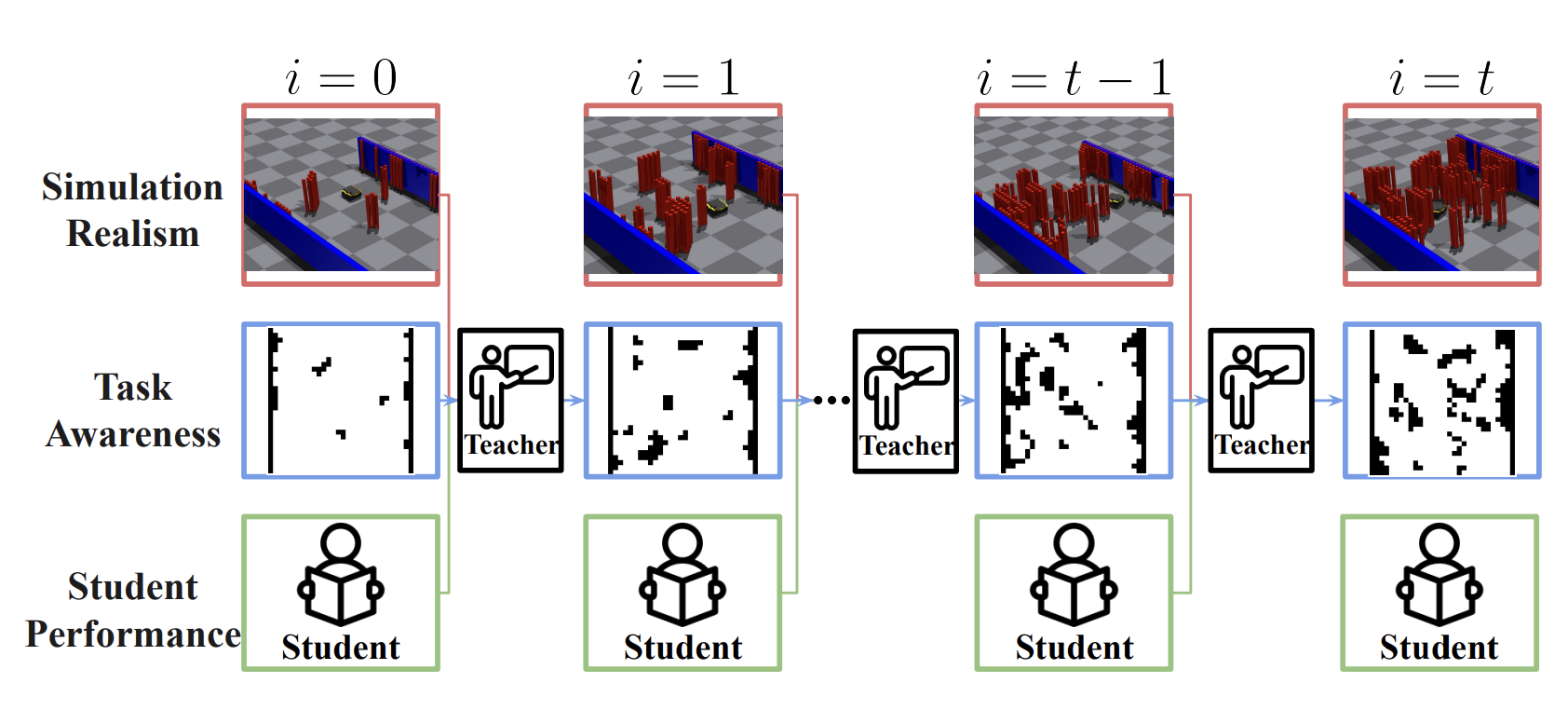
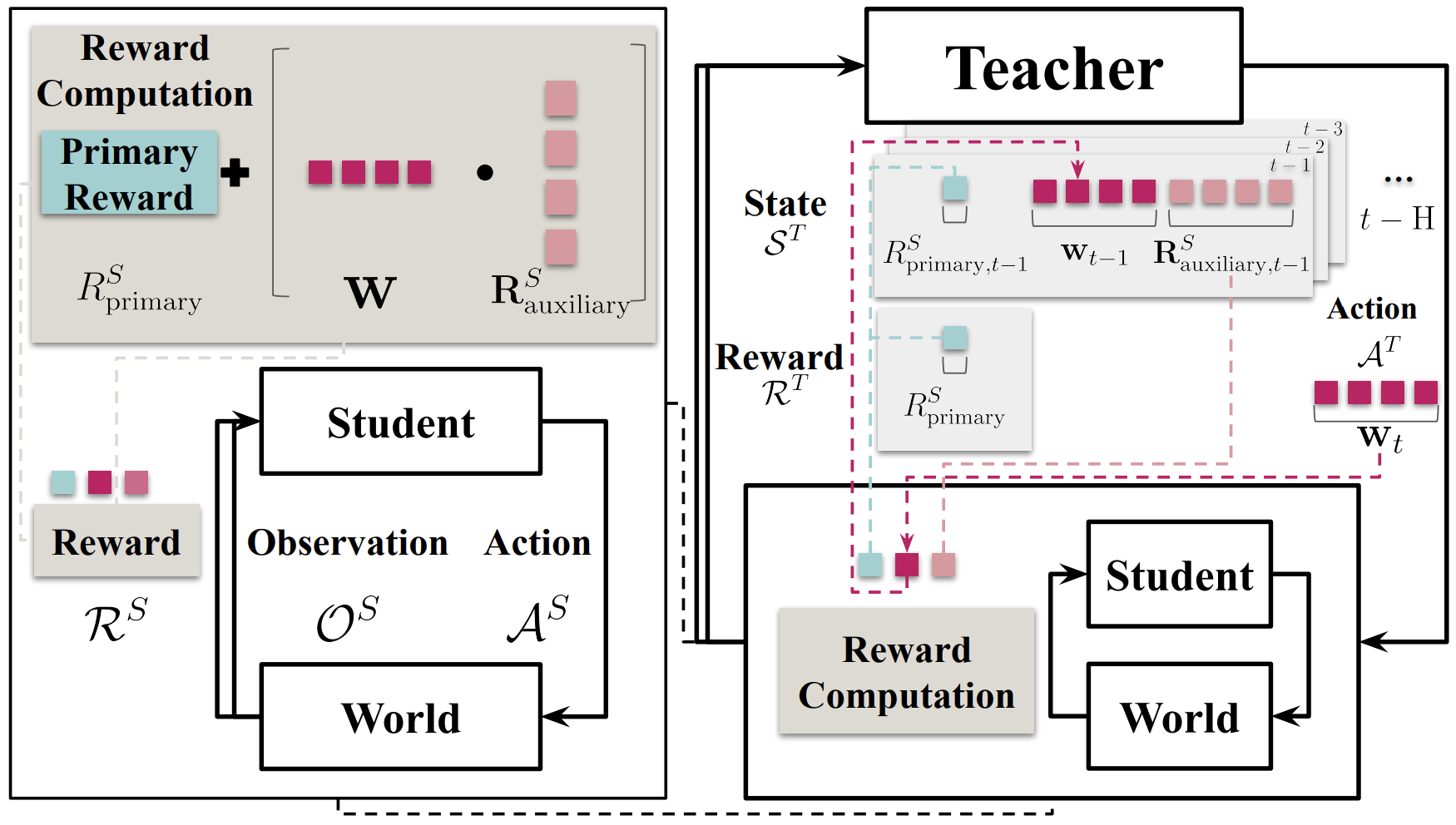
Grounded Adaptive Curriculum Learning (GACL) introduces a teacher-student paradigm where an informed teacher agent automatically generates training curricula by monitoring student performance in real-time. This approach bridges the gap between simulation and reality by grounding curriculum generation in actual robot capabilities. Reward Training Wheels complements this by providing adaptive auxiliary rewards that guide robots through challenging learning phases - like training wheels that automatically adjust and eventually disappear as proficiency increases.
My research has been validated across diverse robotic platforms:
- Quadrupedal robots navigating complex terrains
- Ground navigation vehicles in constrained environments
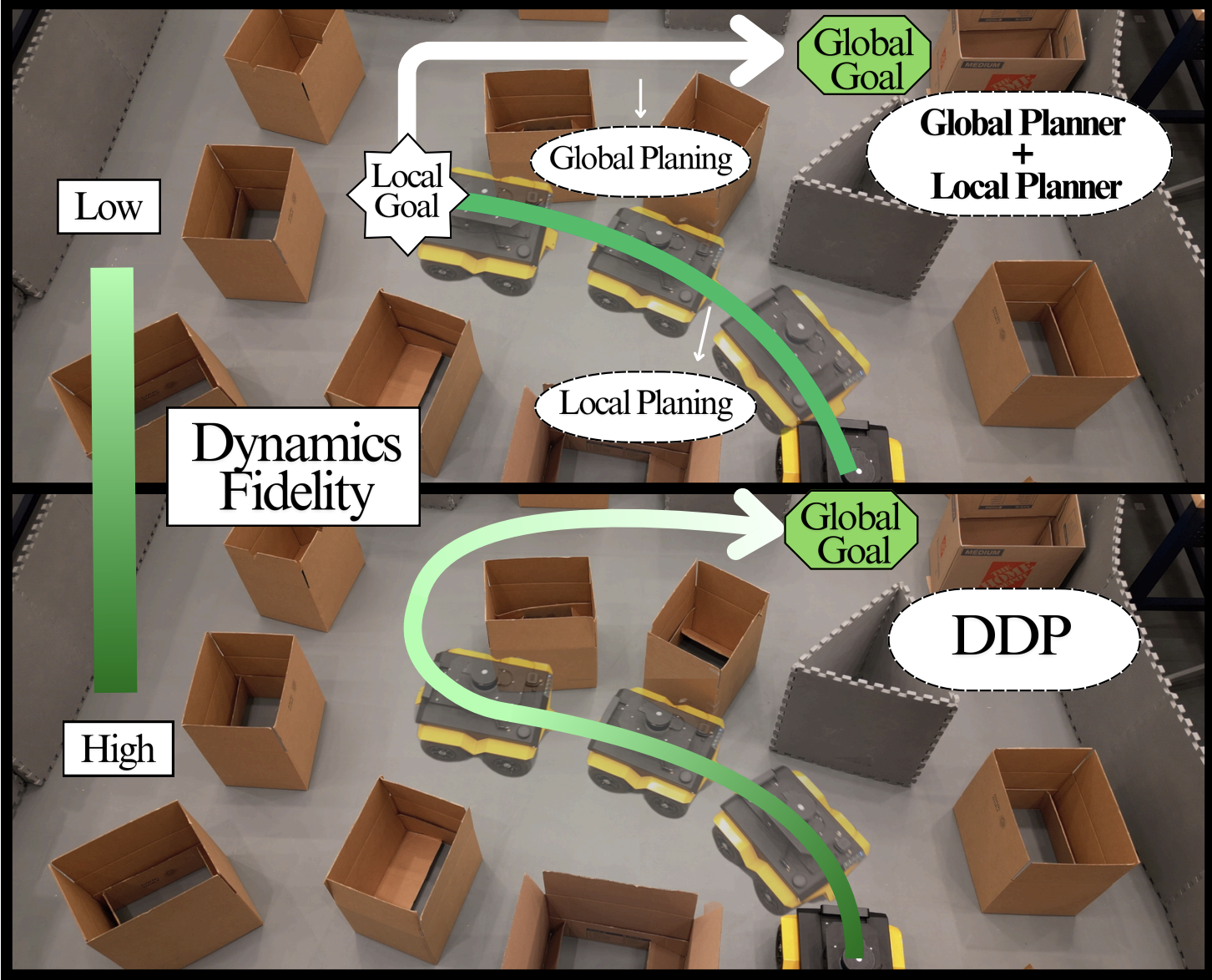
- Off-road autonomous vehicles handling unpredictable dynamics
- Current research: Extending to humanoid robots for manipulation tasks
This work, resulting in three papers accepted at IROS 2025 and one in IEEE RA-L, demonstrates 24.58% higher success rates and 50% improved sample efficiency compared to state-of-the-art methods. Through collaboration with my advisor Dr. Xuesu Xiao and renowned researchers including Peter Stone (UT Austin), I am advancing the frontiers of adaptive curriculum learning and decremental dynamics planning for robust robot autonomy in complex, dynamic environments.
Prior to my Ph.D., I earned my M.S. in Mechanical Engineering from Carnegie Mellon University (GPA: 3.94/4.0), where I developed expertise in 3D perception and AR-guided robotics. I completed my B.S. in Mechanical Engineering at the University of Cincinnati (2016–2021). I also gained industry experience as a Software Development Engineer Intern at Amazon AWS, where I built production-grade systems that reduced performance analysis time from 8 hours to 15 minutes.
My vision is to create robots that learn like we do - starting simple, building competence, and ultimately mastering complex real-world tasks through intelligent curriculum design. This research has profound implications for service robotics, industrial automation, and human-robot collaboration.
Feel free to explore my publications, projects, and CV to learn more about my research and experience.
news
| Jan 23, 2025 | 🎉 Exciting news! Three of our papers have been accepted to IROS 2025 (IEEE/RSJ International Conference on Intelligent Robots and Systems): Looking forward to presenting our work in Hangzhou, China this October! |
|---|---|
| Jun 01, 2024 | 🎊 Thrilled to join Amazon Web Services (AWS) as an SDE Intern on the RDS Proxy team in Bellevue, WA - my first software engineering internship after transferring from Mechanical Engineering to CS! Built ML-powered performance infrastructure including:
|
| Jan 01, 2024 | Formally advanced within the Ph.D. program in Computer Science at George Mason University, deepening my research on curriculum learning for robotics. |
| Sep 15, 2023 | Submitted first research paper to ICRA 2024 based on work from the Computational Engineering and Robotics Lab, marking my entry into the academic research community. |
| Aug 01, 2023 | Started my Ph.D. in Computer Science at George Mason University, joining the RobotiXX Lab to focus on curriculum learning for robotics. |
latest posts
| Jan 23, 2025 | Zelda Claude Code: When Coding Meets Gaming |
|---|