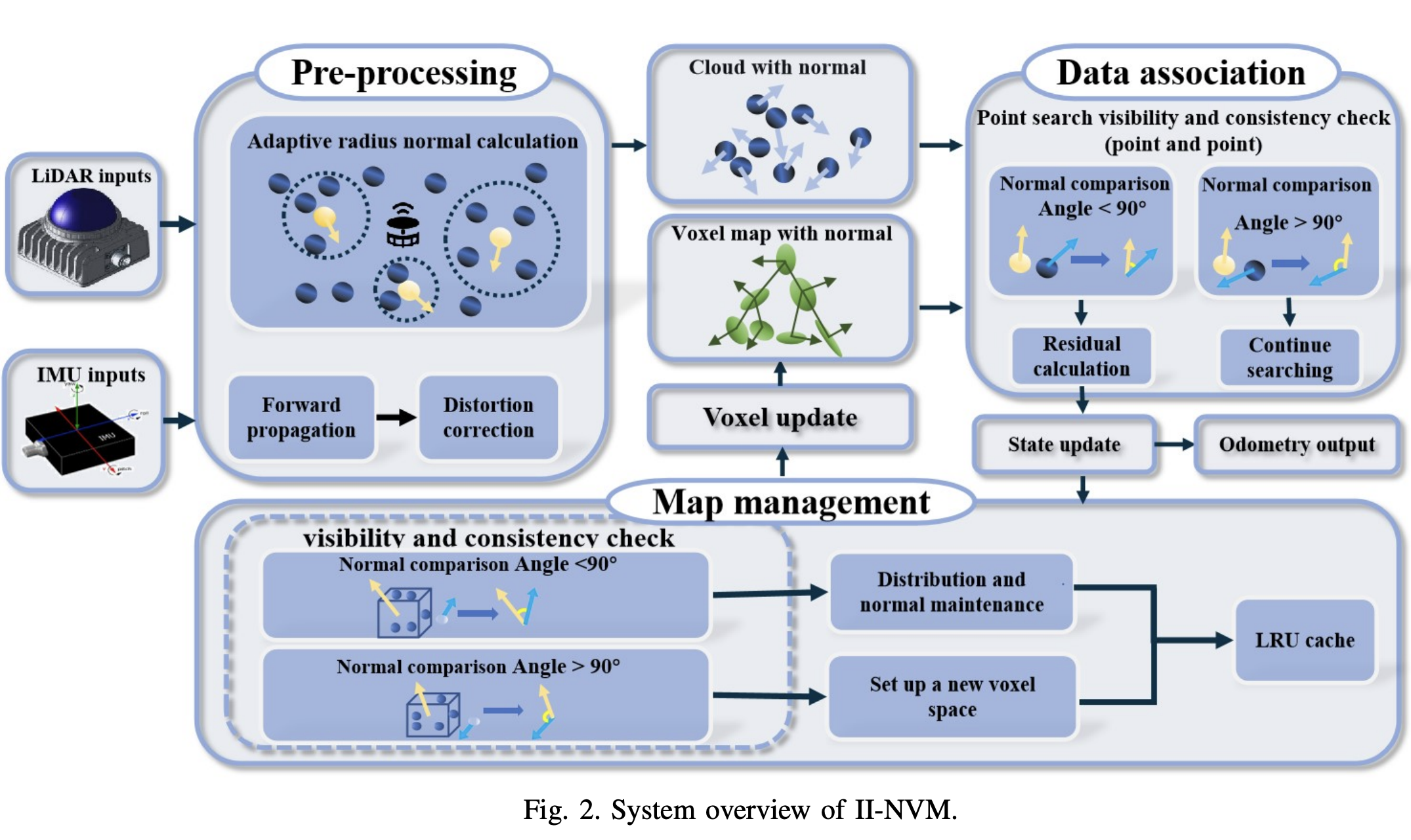
@article{zhao2025ii,title={II-NVM: Enhancing Map Accuracy and Consistency with Normal Vector-Assisted Mapping},author={Zhao, Chengwei and Li, Yixuan and Jian, Yina and Xu, Jie and Wang, Linji and Ma, Yongxin and Jin, Xinglai},journal={IEEE Robotics and Automation Letters},year={2025},publisher={IEEE},}
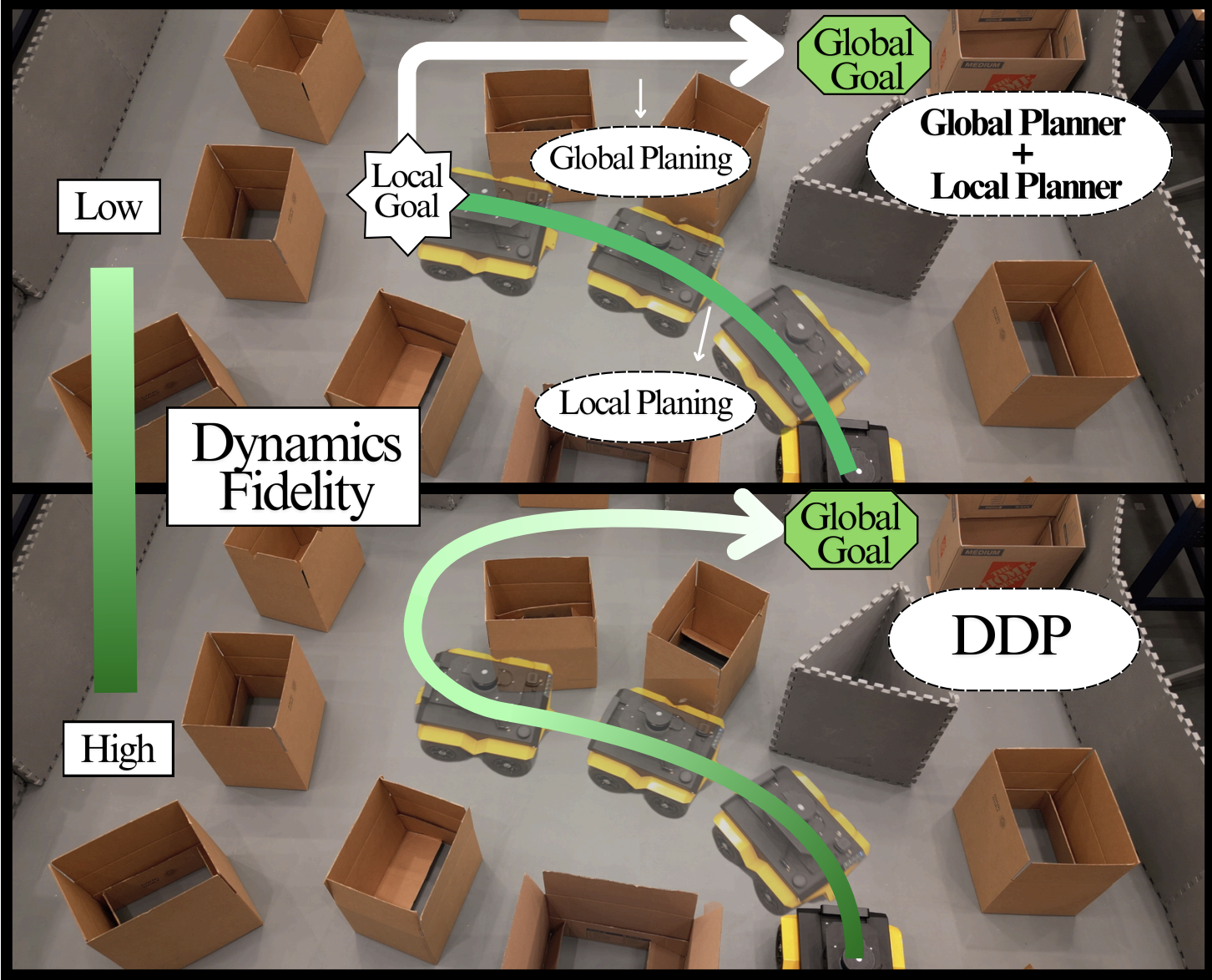
Decremental Dynamics Planning for Robot Navigation
Yuanjie Lu, Tong Xu, Linji Wang, and 2 more authors
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
@inproceedings{lu2025decremental,title={Decremental Dynamics Planning for Robot Navigation},author={Lu, Yuanjie and Xu, Tong and Wang, Linji and Hawes, Nick and Xiao, Xuesu},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},note={Accepted. Submission number: 2899},}
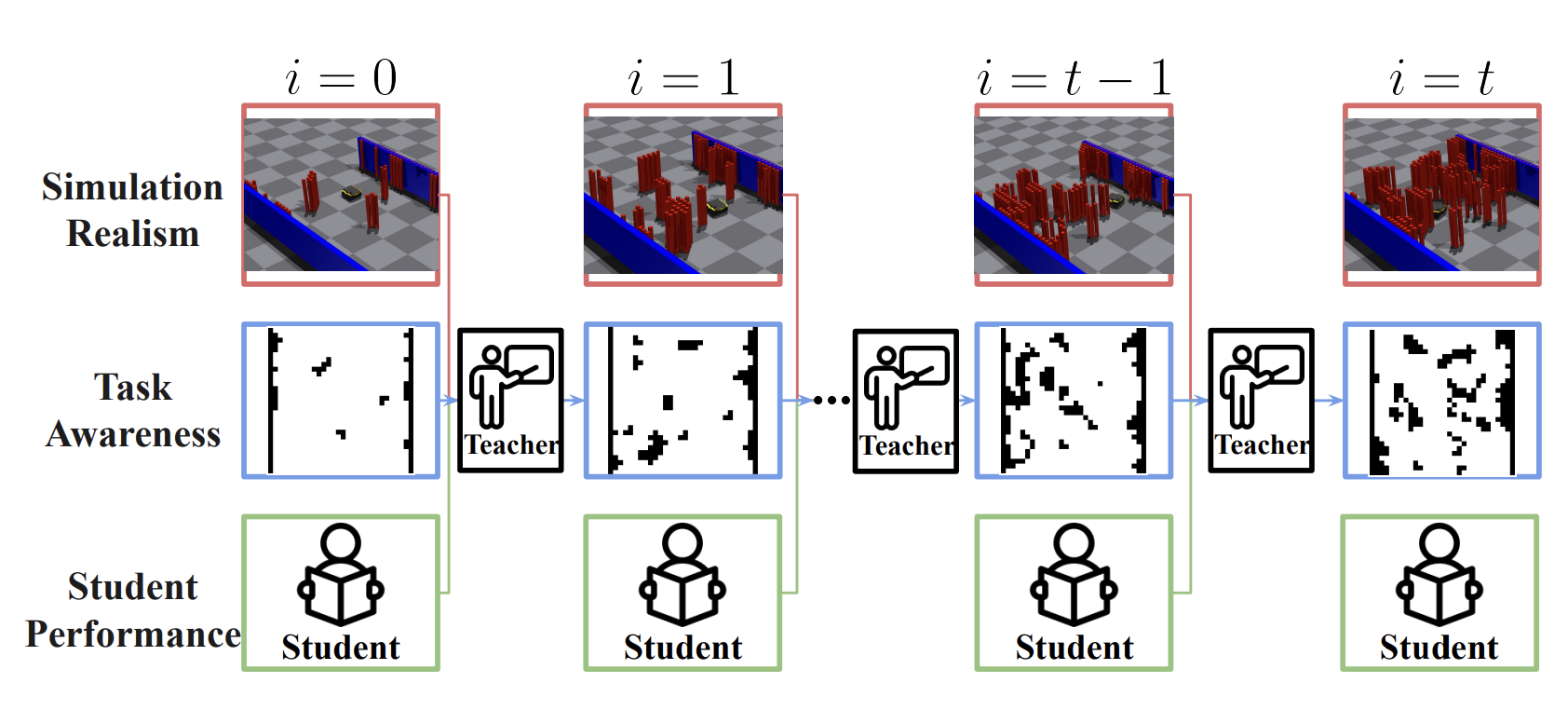
GACL: Grounded Adaptive Curriculum Learning with Active Task and Performance Monitoring
Linji Wang, Zifan Xu, Peter Stone, and 1 more author
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
@inproceedings{wang2025gacl,title={GACL: Grounded Adaptive Curriculum Learning with Active Task and Performance Monitoring},author={Wang, Linji and Xu, Zifan and Stone, Peter and Xiao, Xuesu},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},note={Accepted. Submission number: 1239},}
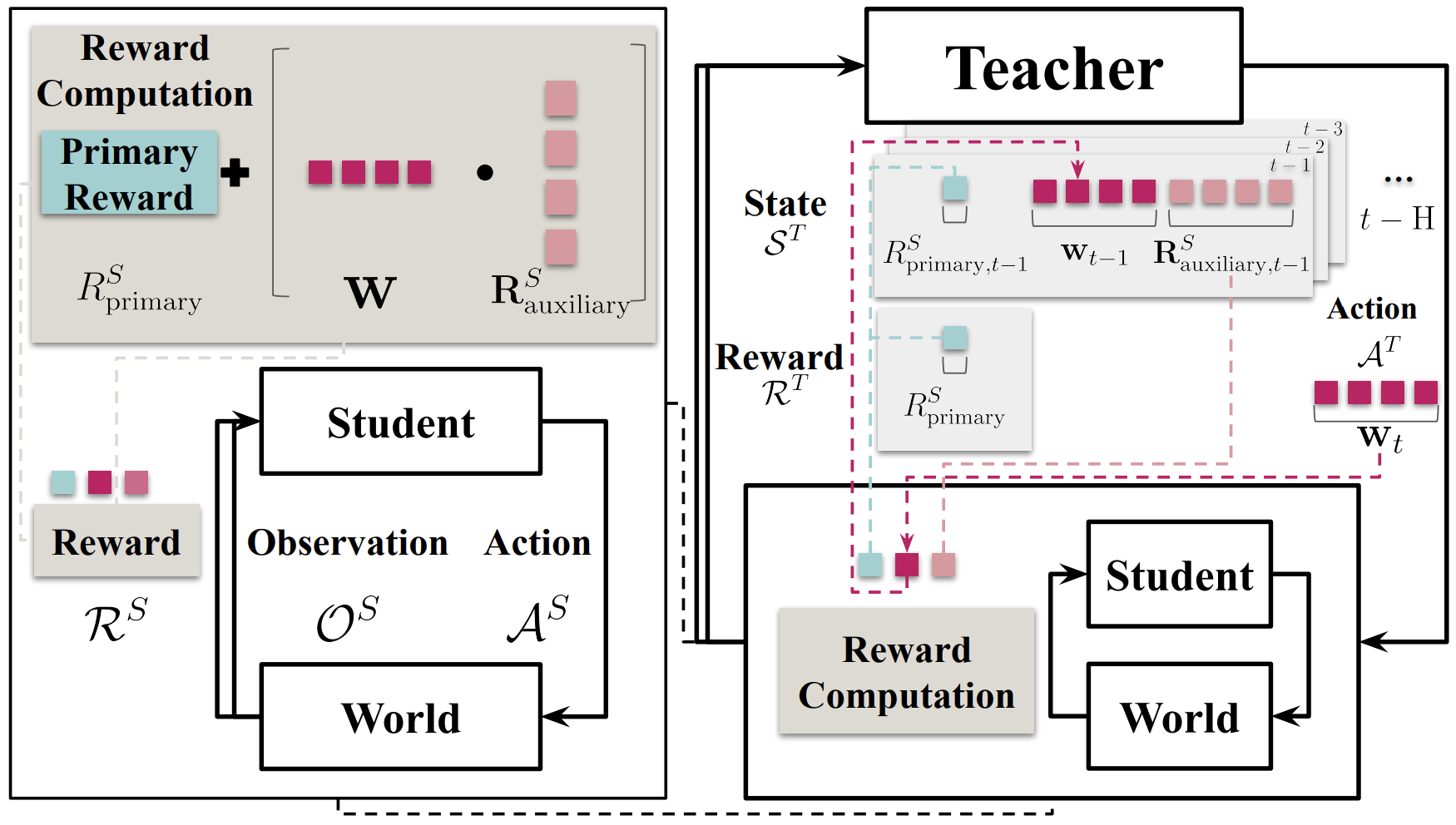
Reward Training Wheels: Adaptive Auxiliary Rewards for Robotics Reinforcement Learning
Linji Wang, Tong Xu, Yuanjie Lu, and 1 more author
In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
@inproceedings{wang2025reward,title={Reward Training Wheels: Adaptive Auxiliary Rewards for Robotics Reinforcement Learning},author={Wang, Linji and Xu, Tong and Lu, Yuanjie and Xiao, Xuesu},booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},note={Accepted. Submission number: 2755},}